進行中・予定中のプロジェクト一覧
PROJECT NO.1
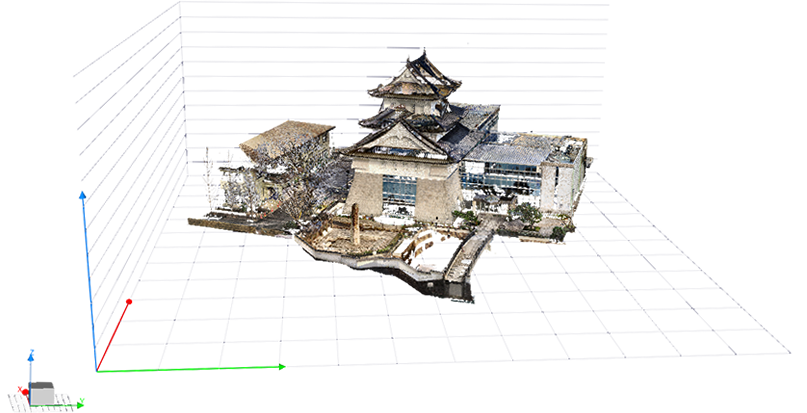
建築物調査



PROJECT NO.2
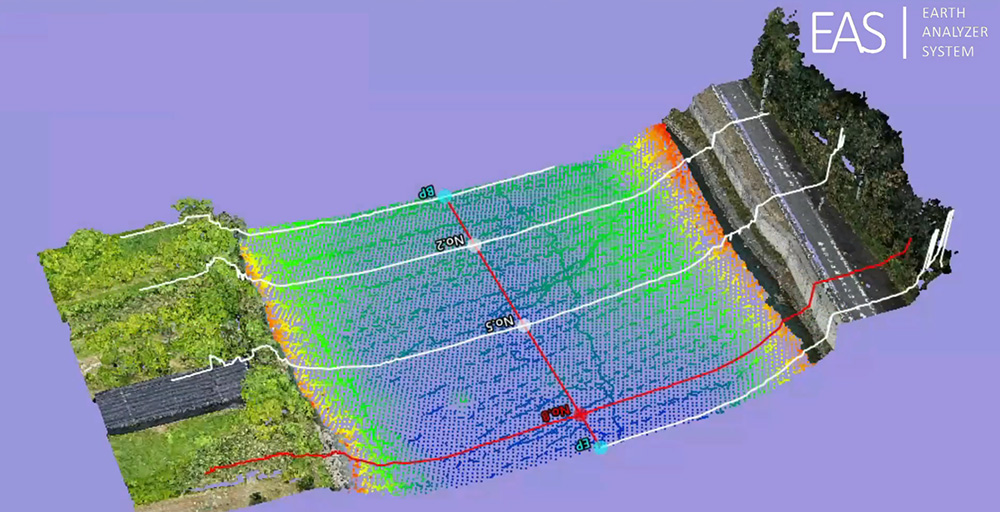
法面測定
PROJECT NO.3
橋梁点検




PROJECT NO.4
シームレスドローンの開発
ドローンのオートパイロット(自動航行)を行う上での大きな壁となる非GNSS環境下での飛行。それを改善するため様々な研究が進んでいる。
赤外線や超音波センサー、最近ではカメラやレーザーを搭載して画像解析(SLAM技術)をしながら飛行するドローンがあり、海外でもその研究は進んでいます。しかし解析しながら飛行するため飛行速度の制限や、飛行場所の制限を受けることになり、これも実用化は限られた範囲でのみとなっている。
我々はインフラメンテナンスを見据えた開発をする中で位置情報をあらゆる環境下でも取得して飛行するドローンが必要であるという結論に達し、シームレスドローンを開発するに至った。
シームレスドローン(Analyzer02)は高精度自動離着陸・航行ドローン(Analyzer01)のスペックを引き継ぎ、さらに非GNSS環境下でも位置情報を取得しながら自動航行できる機能を装備した次世代型自動航行ドローンです。
PROJECT NO.5
測深ボート
従来の河川管理では200M毎にある測点での横断測量が一般的で、船や潜水士の動員が必要な場合もある為、非常にコストと時間が必要になっていた。
そこを解決するために音響測深機器を用いた測量やグリーンレーザードローンを用いた測量が採用されつつあるが、それらの測量にもまだまだ課題が多いというのが現状です。
音響測深機器を用いた深浅測量はマルチビームが主流となっているが、機器が高価なためコスト高となり測定する際のパッチテストの実施やマルチビーム特有のエラー現象が測定時間の延長に繋がっている。
他にもグリーンレーザー搭載型のドローンで測定する方法もあるが、深い箇所や濁度の高い箇所、白波が立っている箇所では測定ができていない。
これらの問題を解決するために取り組んでいるのが、RTK-GNSS搭載のシングルビーム型測深ボートです。
長さ120cm、幅60cm、重量10kgという超小型、最軽量な仕様となっており1人でライトバンに積み込み1人で着水させ測定することが可能です。
スライダー形状で前進するため波の抵抗を受けず流れの速い川でも計測できます。さらにスラスターを船上に取り付けることで水中(水面)にバブルが発生しないため浅瀬まで計測することが可能です。
シングルビームのスワス角はおよそ6°であるため、ほぼ真下しか測定できないというデメリットはあるがRTK-GNSS測位を用いて細かい測線を自動航行で計測することが可能なため測定密度を確保することが出来る。